
ros笔记
指令
创建工作空间
创建工作文件夹 mkdir -p catkin_ws/src
初始化 catkin_init_workspace
编译 catkin_make
设置环境变量 source devel/setup.bash
launch
启动 roslaunch ur3 display.launch
问题总结
核心: 玄学问题就重启 roscore !! 解决80%的问题!
gazebo 运行问题汇总
1、在VM虚拟机运行中报错“VMware: vmw_ioctl_command error 无效的参数.”
首先第一个VMware: vmw_ioctl_command error 无效的参数的问题。这应该是虚拟机的bug,毕竟使用虚拟机和真实的物理机上是有差别的。这有三种解决办法:
第一种:关闭虚拟机的3D图形加速
在编辑虚拟机选项中关闭3D图形加速
第二种:环境变量中设置
在运行之前,提前在终端执行以下命令:export SVGA_VGPU10=0
第三种,仅在launch文件中加入 <env name="SVGA_VGPU10" value="0"/>

报错”[Err] [REST.cc:205] Error in REST request”
问题:
libcurl: (51) SSL: no alternative certificate subject name matches target host name ‘api.ignitionfuel.org’
解决sudo gedit ~/.ignition/fuel/config.yaml
1
将https://api.ignitionfuel.org替换为https://fuel.ignitionrobotics.org
Moveit 配置
1.首先需要确认,roscore是否已经运行。
2.在Workspace的devel文件夹下,打开命令行,并且输入source setup.bash,将文件目录加载到命令行中。
3.再次输入 rosrun moveit_setup_assistant moveit_setup_assistant 打开moveit!Setup assistant工具
4.点击加载已有机器人模型按钮,然后在Browse文件路径按钮处,确定加载的目录是xxx(机器人名称)_moveit_config这个文件夹目录。
rosrun moveit_setup_assistant moveit_setup_assistant 启动Moveit可视化配置
正常情况没有任何报错
开始配置
1、导入模型

2、碰撞关节配置

3、添加组

添加虚拟关节

4、添加固定姿势

5、添信息
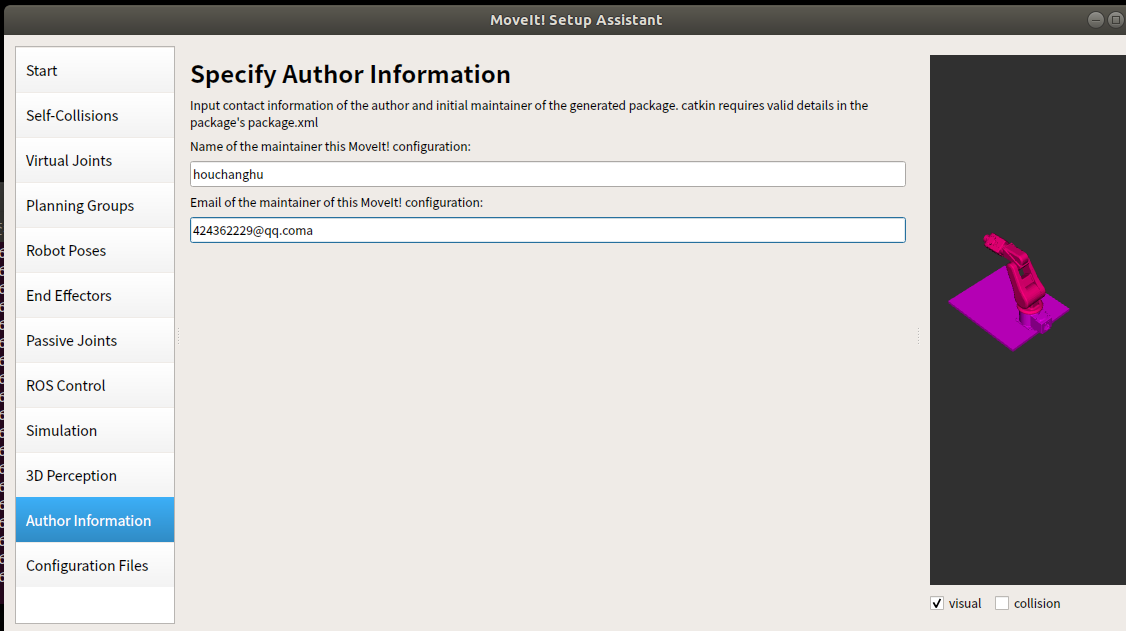
6、生成配置文件

生成后 启动demo.launch测试下
roslaunch probot_anno_moveit_config demo.launch
gazebo 配置
roslaunch probot_gazebo probot_anno_gazebo_world.launch 测试 gazebo
启动总仿真
roslaunch probot_gazebo probot_anno_bringup_moveit.launch
问题解决
1、功能包名称修改
功能包名称修改,不仅要修改文件夹名称,还需要修改功能包内这两个文件内的名称

2、报错1

这个报错我搞了几天也没解决,最后看别人说是无关紧要,,,,
3、报错2

别人说这个报错是因为 “命名空间/运动规划组名称不统一” 但我找了半天也没觉得不一样 最后将 trajectory_execution.launch.xml文件中的最后一行 pass_all_args=”true”删除,发现没有任何问题了。
4、新版moveit 和旧版区别
新版生成的文件和旧版的不一样,就直接用旧版的内容替换掉就行。
参考https://www.bilibili.com/video/BV1g44y1K7U6? https://blog.csdn.net/2201_75624690/article/details/138235035
4.png)
